Wenige kleine Fehler haben die zahlreichen Korrekturdurchsichten gut versteckt überstanden und sind in die Druckfassung des Buchs geraten. Alle relevanten korrigieren wir hier.
Kapitel 4 – Auswertung des Encoders
Der Pin EncoderIRQPin, an den der Encoder-Ausgang angeschlossen wird, muss mit einem Pullup-Widerstand auf 5V gezogen werden – am einfachsten über den internen 20 kOhm-Widerstand mit der Betriebsart INPUT_PULLUP (statt INPUT, wie im Buch irrtümlich in den Sketchen 4-3, 4-4, 4-12, 4-16 und 4-20 abgedruckt). Danke an unseren Leser Arnoud van Delden für diesen Hinweis.

In Abb. 4-35 (ebenso 4-36 und 4-41) haben wir den Encoder an die 9V-Stromversorgung des Motor Shield angeschlossen. Nach dem Datenblatt von fischertechnik zum 9V-Encodermotor genügen jedoch auch die 5V des Arduino – das ist zudem sicherer, auch wenn der Encoder lediglich ein 10mA-Signal zurück liefert und der interne Pullup-Widerstand des Arduino größer ist als die von fischertechnik empfohlenen 4,7-10kOhm (Danke für den Hinweis an unseren Leser Ralf Ademes).
Außerdem ist uns bei der Impulsberechnung eine Ungenauigkeit unterlaufen: Der Encoder-Motor der 2. Generation (153422) liefert 63,9 Impulse je Achsumdrehung und nicht 63 1/3, wie auf S. 158 angegeben. Damit erhöht sich die Zahl der Impulse, die bei der im Buch verwendeten Bereifung (Reifen 50) einem Zentimeter Fahrstrecke entspricht, um 0,9% auf 14,606.
Wir haben beide Fehler in den Sketchen des Flitzers korrigiert.
Kapitel 5 – Anschluss der Schrittmotoren
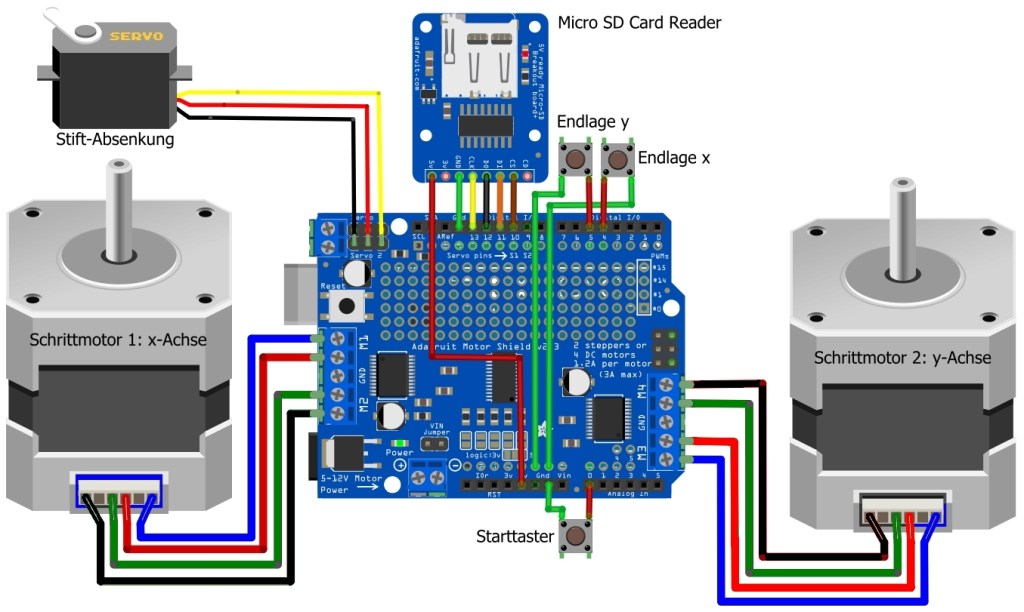
Der Anschluss der Schrittmotoren an das Adafruit Motor Shield ist auf den Seiten 240/241 korrekt beschrieben – in Abb. 5-25 auf Seite 242 stimmen jedoch die Farben der Anschlusskabel nicht. Danke an Andreas Gürten für diesen Hinweis.
Kapitel 7 – Direkte Kinematik
In der Funktion „winkel_widerstand()“ in Listing 7-17 auf S. 389 hat sich ein Fehler eingeschlichen, den wir im herunterladbaren Sketch verbessert haben. Korrekt muss die „for“-Schleife wie folgt lauten (Danke an Dr. Horst Meißner für den Hinweis):

