
Bei der mechanischen Ausgestaltung und informationstechnischen Steuerung der fünf fischertechnik-Modelle, die wir im Buch vorstellen, haben wir versucht, uns den „Grenzen des Möglichen“ zu nähern: Wir möchten zeigen, wie mit vergleichsweise einfachen Mitteln anspruchsvolle Roboter konstruiert werden können. Das war bisweilen eine Herausforderung, bei deren Bewältigung uns gelegentlich ein paar Tricks und Kniffe geholfen haben. Viele solcher Tipps & Tricks finden sich im Buch. Angeregt durch Rückmeldungen unserer Leser veröffentlichen wir hier einige weitere, die beim Nachbau der Modelle hilfreich sein können oder mögliche Schwierigkeiten lösen.
fischertechnik-Designer
Verwendung der Designer-Dateien als Bauanleitung (alle Modelle/Kapitel)
Tipp: Einsteigern im Umgang mit dem fischertechnik-Designer legen wir die Tutorials von Andreas Gürten ans Herz (Grundlagen, Fortgeschrittene, Kinematik).
Wie kann ich mir ausgewählte Teile der Modelle anzeigen lassen? Die Designer-Modelle sind teilweise komplex, sodass man einzelne Teile der Modelle schwer erkennen kann, da sie von anderen Bauteilen verdeckt werden.
Lösung: Wir haben die Modelle in mehrere Bauphasen unterteilt, die jeweils inhaltlich zusammengehören. Unter dem Menupunkt „Bauphasen“ kann man die Bauphasen einzeln ein- und ausblenden. Wenn man in den Systemeinstellungen (Menupunkt „Datei“) im Reiter „3D-Fenster“ die Option „Bauteile aus älteren Bauphasen weiß darstellen“ wählt, werden nur die Bauteile der aktiven Bauphase (und späterer) farbig dargestellt.
Wie erhalte ich eine Übersicht der benötigten Bauteile? Eine Bauteileliste hilft, um vor Beginn der Konstruktion sicherzustellen, dass man über alle benötigten Bauteile verfügt. Auch beim Nachbau ist es hilfreich, eine Bauteileliste zur Hand zu haben.
Lösung: Für alle fünf Modelle im Buch haben wir je eine Bauteileliste erstellt; sie kann auf der Seite Material heruntergeladen werden. Für alternative Konstruktionen, die wir mit einer Designer-Datei veröffentlichen, kann die Bauteileliste unter dem Menupunkt „Datei“ („Drucken“/“Einzelteilübersicht“) ausgedruckt werden. Auch die in einer einzelnen Bauphase benötigten Bauteile lassen sich in Erfahrung bringen: Unter dem Menupunkt „Bauphasen“ muss man „Bauteile der Bauphase zeigen“ auswählen; dann werden die benötigten Bauteile in einem eigenen Fenster angezeigt und können als Grafikdatei gespeichert werden.
IR-Fernsteuerung
Kapitel 3 (Der Buggy) und Kapitel 4 (Der Flitzer)
Tipp: Statt der TV- oder HiFi-Fernbedienung aus dem eigenen Haushalt kann man auch eine „Ersatz-Fernbedienung“, eine Universal-Fernbedienung oder eine simple IR-Fernbedienung aus dem Elektronikhandel verwenden (siehe auch unter Modellvarianten).
Kommt es bei der IR-Fernsteuerung – bei geringer Entfernung, wenig Störlicht und vollen Batterien – zu fehlerhaftem Empfang? Dann kann das an der Treiberbibliothek liegen. Die Arduino-IDE wird mit der IR-Bibliothek „RobotIRremote“ ausgeliefert, die eine ältere Version der IRremote-Bibliothek von Ken Shirriff enthält, und beim Kompilieren vorrangig eingebunden wird.
Lösung: Damit bei der Übersetzung die aktuelle Bibliothek IRremote verwendet wird, muss man die Standard-Bibliothek RobotIRremote aus dem Arduino-Programmverzeichnis (Arduino\libraries\RobotIRremote) löschen. (Sie kann bei Bedarf wieder über Github nachinstalliert werden.)
Werden bei einem Tastendruck auf der Fernsteuerung unterschiedliche Werte empfangen? Manche Fernsteuerungen senden bei längerem Tastendruck nach dem Tasten-Code „0xFFFFFFFF“ als Wiederholungssignal. Außerdem gibt es Fernsteuerungen, bei denen die Tasten-Codes alternieren – beim zweiten Tastendruck wird ein anderer Wert geliefert.
Lösung: Das Wiederholungssignal kann man herausfiltern oder nutzen, wenn die gedrückte Taste mehrfach ausgewertet werden soll (bspw. für eine Geschwindigkeitserhöhung oder -verringerung). Bei alternierenden Codes kann mit der Taste etwas ein- und bei erneutem Tastendruck wieder ausgeschaltet werden.
Abstandsmessung mit dem HC-SR04
Kapitel 3 (Der Buggy)
Achtung: Den Ultraschall-Abstandssensor HC-SR04 gibt es in unterschiedlichen Versionen. Je nach Hardware kann es bei der Messung zu einer Verzögerung von bis zu 3 ms kommen – sodass der Timeout-Wert für die maximale Laufzeit der Ultraschall-Entfernungsmessung angepasst werden muss. Vielen Dank für diesen Hinweis an unseren Leser Klaus Janssen!
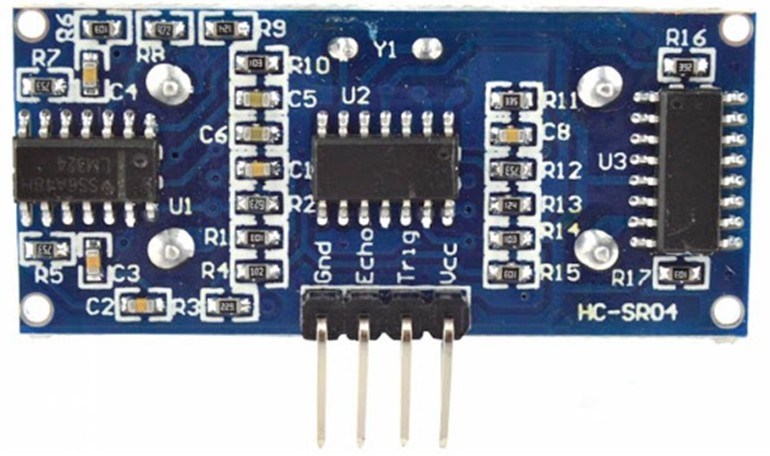
HC-SR04
Mein Ultraschall-Abstandssensor erkennt keine Hindernisse. Was kann ich tun? Die Sketche für den Buggy, die den Ultraschallsensor zur Hinderniserkennung verwenden, arbeiten mit einem TIMEOUT-Wert von 3 ms, um die Dauer der Ultraschall-Abstandsmessung für „nahe“ Hindernisse zu verkürzen (siehe S. 90). Offenbar gibt es jedoch Versionen des HC-SR04, bei denen die Messung mit einer Verzögerung von bis zu 3 ms beginnt, sodass bei einem TIMEOUT-Wert von 3000 kein Hindernis erkannt wird.
Lösung: Neben dem TIMEOUT-Wert wird eine Konstante DELAY definiert, die diese Verzögerung (in Mikrosekunden) durch eine entsprechende Verlängerung der maximalen Mess-Laufzeit kompensiert. Der Sketch muss dann wie folgt angepasst werden:
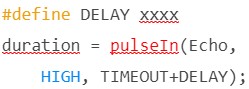
Den Wert xxxx für DELAY können wir leicht mit einer kleinen Messreihe bestimmen: Wir testen mit dem Sketch Ultraschall-Abstandssensor_HC-SR04.ino (in Sketche_Buggy.zip), welcher maximale Abstand in cm mit unterschiedlichen Werten für TIMEOUT gemessen werden kann.
Dazu entfernen wir den Sensor langsam von einem flachen Objekt, bspw. einer Wand, bis der serielle Monitor kein Wert mehr ausgibt. Wenn wir diese maximalen Abstandswerte (y-Achse) abhängig vom jeweils eingestellten TIMEOUT-Wert (x-Achse) auf einer Skala abtragen, können wir durch Verlängerung der Geraden den Wert für DELAY als Schnittpunkt mit der x-Achse bestimmen. Hier das Ergebnis einer Messung mit der links abgebildeten Variante des HC-SR04:
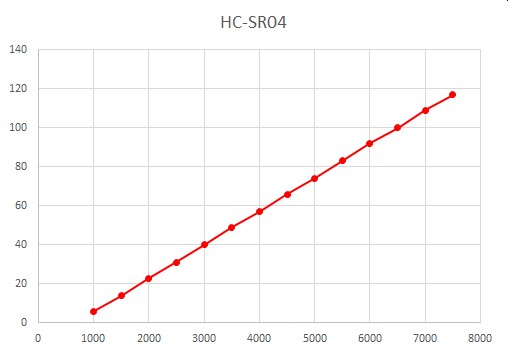
Für diese Version des HC-SR04 sollten wir also einen Wert von etwa 0,7 ms (700) für DELAY wählen, um die Verzögerung bei der Messung auszugleichen.
Gehäuse für die Pixy2
Kapitel 3 (Der Buggy)
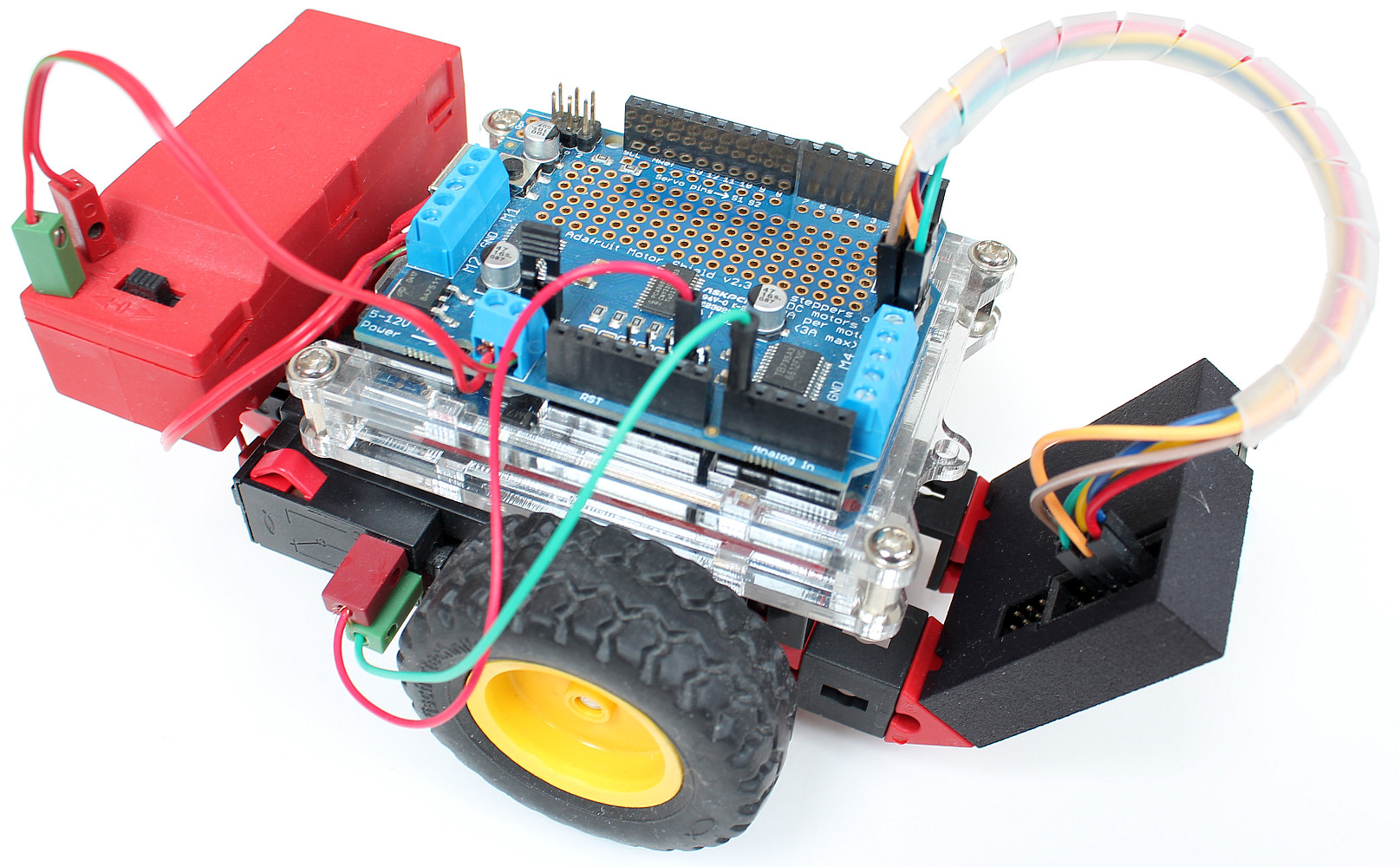
Tipp: Die Pixy2-Kamera, die den Buggy zum zuverlässigen Spurfolger macht, lässt sich mit einem 3D-Druck-Gehäuse aufwerten – mit fischertechnik-Nuten für eine komfortable Montage.
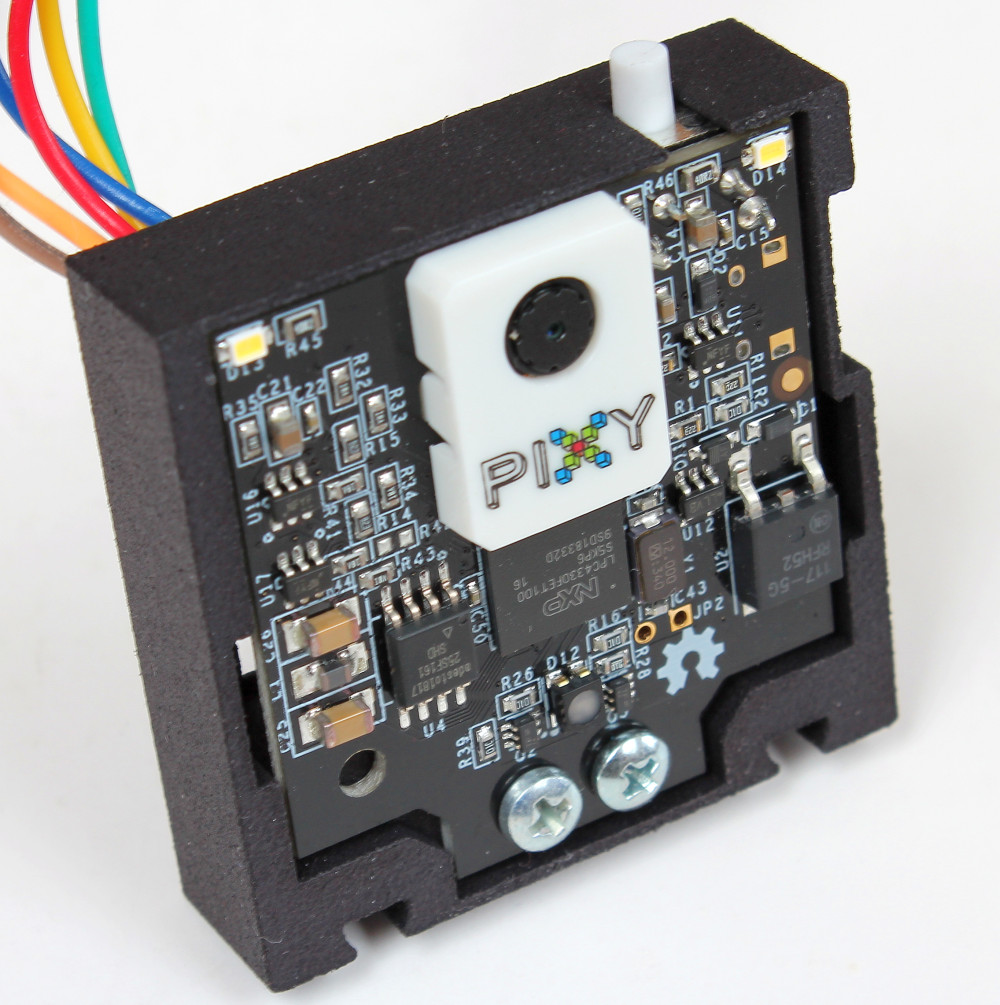
Lösung: Dr. Till Harbaum hat für die Pixy2 ein Gehäuse mit fischertechnik-Nuten entworfen und auf thingiverse veröffentlicht. Auf einem 3D-Drucker oder über einen 3D-Druck-Service ausgedruckt schützt es die rückseitige Platine der Pixy2; alle Anschlüsse und der weiße „Anlern-Knopf“ sind weiterhin zugänglich.
fischertechnik-Servos
Kapitel 4 (Der Flitzer)
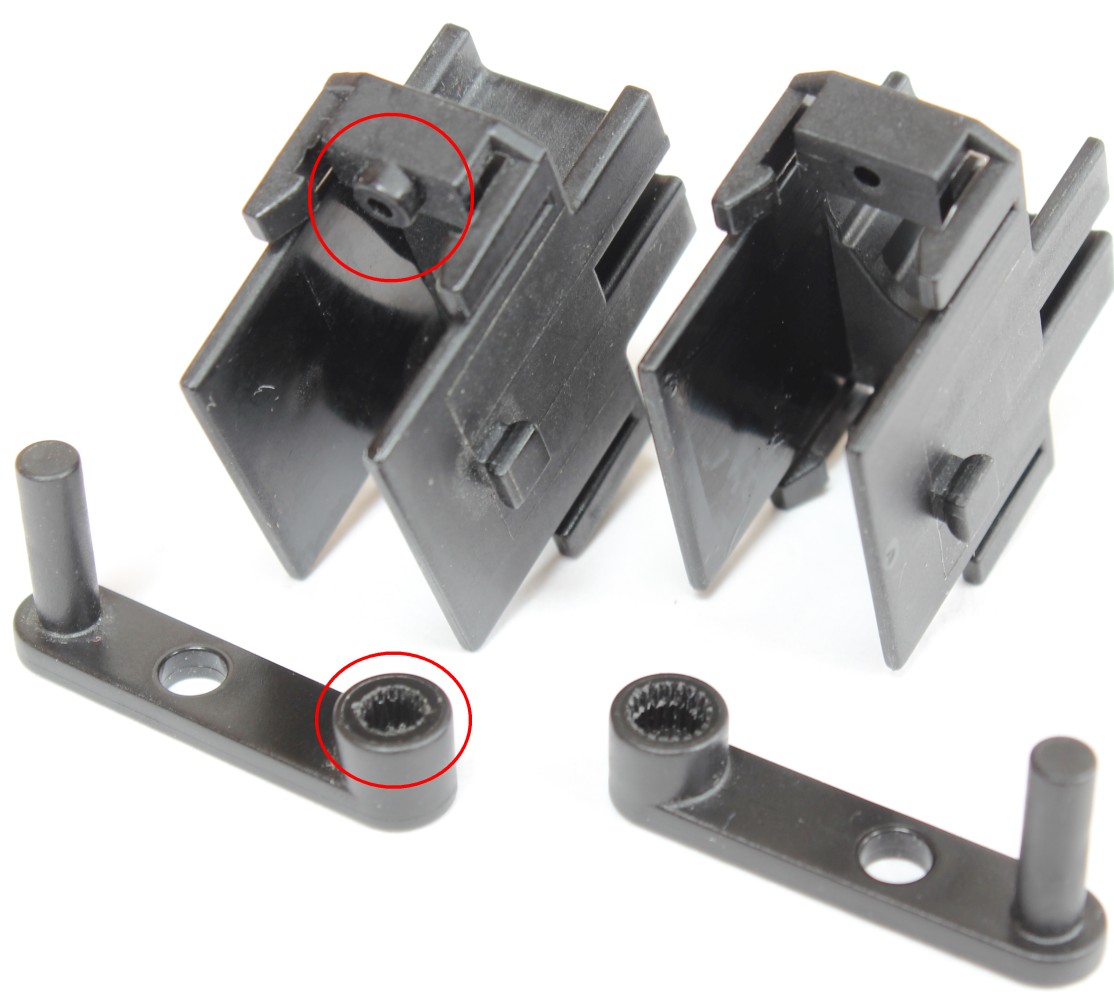
Achtung: fischertechnik hat im Mai 2015 den Lieferanten der Micro-Servos gewechselt. Daher sind ältere Servohalter und Servohebel (links) und aktuelle (rechts) nicht identisch: Die älteren Servohalter haben kleine „Nasen“, und ältere Servohebel passen nur auf kleinere Abtriebsritzel (siehe rote Markierungen). Der aktuelle Standard sind Servohebel für Ritzel mit 4,9 mm Durchmesser („Servohebel D“).
Mein Servo reagiert nicht mehr – was kann ich tun? Die fischertechnik-Servos haben ein Metallgetriebe. Am Antrieb befindet sich jedoch ein Kunststoff-Zahnrad, dessen Zähne bei Überlast „abgeschliffen“ werden.
Lösung: Servos stellen das Abtriebsritzel mit einem erheblichen Drehmoment auf die gewünschte Position ein. Stoßen sie auf Widerstand, versuchen sie das zu korrigieren – und ziehen dabei viel Strom. Irgendwann gibt entweder der Servo nach oder das Getriebe. Daher sollte ein Servo nicht über einen mechanischen Anschlag hinaus (wie ihn beispielsweise der Servo-Halter vorgibt) eingestellt werden.
Geht ein Servo doch einmal in die „ewigen Maker-Jagdgründe“ ein, ist fischertechnik sehr kulant und ersetzt in der Regel eingeschickte defekte (Original-) Servos. War der Servo älterer Bauart, kann es sein, dass der Ersatz-Servo nicht mehr zu Servohebel und Servohalter passt. Bei alten Servohaltern kann man mit einem scharfen Messer die seitlichen „Nasen“ vorsichtig abtrennen und sie so passend machen. Bohrt man hingegen einen alten Servohebel auf, damit er auf das (größere) Ritzel des aktuellen Servos gesteckt werden kann, verliert man die innen liegenden Zähne. Daher ist in diesem Fall die Nachbestellung eines neuen Servohebels zu empfehlen.
Die fischertechnik-Servos sind mit 40 Euro nicht gerade ein Schnäppchen. Gibt es kompatible Alternativen?
Lösung: Der fischertechnik-Servo ist ein S09012MG von Longtai Aviation Electronic Technology Co., Ltd. Tatsächlich gibt es baugleiche Micro-Servos für unter 10 Euro. Aber – wie so oft – liegt der Teufel im Detail.
Der chinesische Hersteller FeeTech bietet mit dem FT90M einen mit den aktuellen fischertechnik-Servo-Maßen identischen Servo mit Metallgetriebe an, der für unter 10 Euro erhältlich ist. Allerdings ist das Abtriebszahnrad kleiner; darauf passt nur der alte Servohebel (getestet). Auch der MG90S, ein verbreiteter und günstiger Micro-Servo mit Metallgetriebe und halbtransparentem Gehäuse, passt in den aktuellen Servo-Halter und Servo-Hebel; die beiden „Zangen“ schnappen allerdings nicht ein, weil die seitlichen Befestigungsstege einen halben Millimeter dicker sind als beim fischertechnik-Servo (getestet).
Nach dem Datenblatt ebenfalls identische Maße und ein Metallgetriebe hat der Servo GS-9025MG von Goteck; hier stimmt auch der Durchmesser des Abtriebszahnrads mit dem aktuellen Servo überein (nicht getestet).
Fahrbahn für den Flitzer
Kapitel 4 (Der Flitzer)
Tipp: Der Flitzer ruft geradezu nach einer Teststrecke. Die gelingt mit geringen Kosten.

Wie kann der Flitzer sein Können auf einer „Inhouse-Fahrbahn“ unter Beweis stellen?
Lösung: Für unter 10 € erhält man im Bastelbedarf 10 Bögen 70 x 100 cm großes schwarzes Ton(zeichen)papier, aus denen sich ein modularer Straßen-Parcours gestalten lässt. Aufgerollt nehmen die Bögen nur sehr wenig Raum ein. Stabiler (und etwa doppelt so teuer) ist schwarzer Fotokarton in denselben Maßen, der allerdings nicht aufgerollt gelagert werden kann.
Für die Fahrbahnmarkierungen eignet sich einfachstes weißes, 1,8 cm breites PVC-Isolierband aus dem Baumarkt für 10-15 ct/m: Es ist (im Unterschied zu Textilklebeband) lichtbeständig und dehnbar, was das Abkleben von gebogenen Linien vereinfacht. Für jedes Straßensegment (ein Bogen Tonpapier) benötigt man rund 2,5-3 m Band, für alle 10 Bögen also bis zu 30 m (für < 4 €).
Welche Maße sollten die Fahrbahnmarkierungen haben?
Lösung: In Deutschland bestehen Fahrbahnmarkierungen überwiegend aus Schmalstrichen von 12 cm und Breitstrichen von 25 cm Breite. Unterbrochene Fahrstreifenkennzeichnungen („Leitlinien“) haben innerorts eine Länge von 3 m, auf Autobahnen 6 m. Das Verhältnis von „Strich“ zu „Lücke“ liegt bei 1:2. Fahrstreifen haben eine Breite von 2,75 bis 3,75 m.
Umgerechnet auf unseren Flitzer, dessen Maße bei einer Breite von 12 cm (SUV-Version: 13 cm) und einer Länge von 26,5 cm (SUV-Version: 28 cm) etwa im Verhältnis 1:14 bis 1:16 zu einem „ausgewachsenen“ Fahrzeug stehen, sollten die Schmalstriche also etwa 0,8 cm breit sein. Unser Isolierband entspricht in der Breite etwa einem Breitstrich (25 cm), daher haben wir für unsere Fahrbahn Breitstriche gewählt. Die unterbrochenen Fahrstreifenkennzeichnungen sollten etwa 20 cm lang sein, die Fahrstreifenbreite zwischen 18 und 25 cm liegen. Damit passt eine komplette Fahrbahn aus zwei 20 cm breiten Fahrstreifen und (einseitigen) Parktaschen problemlos auf unser 70 cm breites Tonpapier.
Nutzung der fischertechnik-Schrittmotoren
Kapitel 5 (Der Plotter)
Achtung: Die fischertechnik-Schrittmotoren, die in der ersten Auflage des fischertechnik-Kastens zum Buch enthalten waren, haben nach Datenblatt eine Nennspannung von 4V und sollten daher nicht mit einem 9V-Netzteil angesteuert werden, sonst bringen sie das Adafruit Motor Shield an die Belastungsgrenze.
Werden die fischertechnik-Schrittmotoren und die ICs des Adafruit Motor Shields beim Betrieb sehr heiß? Die Schrittmotoren erwärmen sich bei einem längeren Plot schnell auf rund 70°; auch die ICs des Adafruit Motor Shields werden heiß. Das ist ungesund…
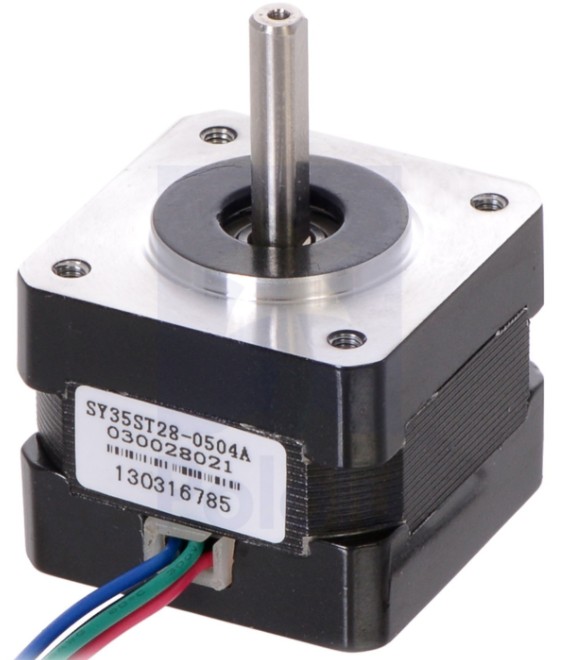
Ursache: Die fischertechnik-Schrittmotoren (160842), die mit der ersten Auflage des Baukastens zum Buch geliefert werden, sind NEMA-14 Stepper-Motoren der Firma Moons vom Typ 14HS5405-02N. Sie gehören ursprünglich zum fischertechnik-3D-Drucker. Nach den technischen Daten ziehen sie bei einer Nennspannung von 4V einen Nennstrom von 1,2A; das entspricht der Lastgrenze des Adafruit Motor Shield. Daher sollten sie nicht mit einem 9V-Netzteil betrieben werden.
Bei den Tests einiger Leser haben sie bei 9V Nennspannung je Wicklung über 0,8A (zusammen also mehr als 3,2A) Strom gezogen – das überstehen Motor Shield und Schrittmotoren nur kurzfristig.
Lösung: Anstatt das Adafruit Motor Shield mit den für fischertechnik üblichen 9V zu versorgen, sollten beim Plotter lediglich 5V angelegt werden – durch Verwendung eines Step-Down-Spannungsreglers oder eines anderen Schaltnetzteils.
Alternative: Die Last sinkt bei längeren Bewegungen auf etwa 50%, wenn man im Sketch die Motorgeschwindigkeit (#define Speed) von 500 auf 800 erhöht, und noch einmal um rund 35%, wenn man in den Funktionen IN, MoveX, MoveY und PR statt des „DOUBLE“- den „SINGLE“-Mode verwendet. Vielen Dank an Klaus Janssen für diesen wertvollen Hinweis!
Die von uns verwendeten und auf der Material-Seite empfohlenen NEMA-14-Schrittmotoren von Pololu ziehen bei einer Nennspannung von 10V lediglich 0,5A, liegen also perfekt in der Spezifikation des Adafruit Motor Shield und können problemlos mit einem fischertechnik-9V-Netzteil genutzt werden.
Stiftabsenkung und
HP-GL-Konvertierung
Kapitel 5 (Der Plotter)
Tipp: Die Präzision des Plotters hängt an der Mechanik: fest sitzende Bausteine, eine exakte Justierung des Schreibkopfs und ein gut eingespannter Papierbogen sind dabei besonders wichtig.
Entstehen beim Absenken oder Anheben des Stifts kleine „Nasen“ in der Zeichnung? Berührt der Stift in der Absenk- oder Anhebebewegung das Papier, kann es dazu kommen, dass eine Linie zu früh begonnen oder unerwünscht fortgesetzt wird.
Lösung: Spannt man das Papier fest auf die Bauplatte und unterlegt man es z. B. mit einem DIN-A5-großen Stück Kunststoff, dann berührt bei passender Wahl des Absenkwinkels der Stift nur knapp die Schreibfläche und es kommt beim Absenken oder Anheben nicht zu einer Verlängerung der Linie, weil bspw. das Papier vom Stift nach unten gedrückt wird. Durch Veränderung der Konstanten „Delay“ im Sketch kann außerdem die Wartezeit des Plotters beim Absenken oder Anheben des Stifts (in ms) angepasst werden, bevor der Schreibkopf weiterbewegt wird.
Wird eine in HP-GL konvertierte Vektorgrafik nicht korrekt ausgedruckt? Eine Ursache kann sein, dass einige HP-GL-Konverter (oder Export-Funktionen) bei direkt aufeinander folgenden PA-, PR- oder PD-Befehlen das Befehlskürzel weglassen. Der HP-GL-Parser des Plotters erwartet es aber zu Beginn eines Kommandos und überspringt „überflüssige“ Parameter.
Lösung: Als „Fingerübung“ kann man einen kleinen Konverter programmieren, der das jeweils letzte eingelesene Befehlskürzel wiederverwendet, wenn weitere Parameter folgen, und den (nun syntaktisch korrekten) Befehl in eine neue HP-GL-Datei schreibt. Alternative: Vektorgrafik mit einem anderen Konverter in HP-GL umwandeln.
Plotter-Stift stabilisieren
Kapitel 5 (Der Plotter)
Tipp: Ist die Plotter-Konstruktion stabil, bleibt noch eine mögliche Ursache, falls gerade Linien wackelig geraten: der Stift.
Ist die geplottete Linie wackelig? Der abgesenkte Stift wird durch die Berührung mit dem Papier gebremst. Drückt er (zu) fest auf das Papier, kann es dazu kommen, dass sich der Plotterkopf bereits bewegt, der Stift aber „festhängt“ und erst verzögert reagiert. Auch mit genauem Justieren der Stifthöhe lässt sich der Effekt möglicherweise nicht ganz beseitigen.
Lösung: Stabilisiert man den Stift weiter oben am Plotterkopf durch eine lose Führung, lässt sich das beobachtete „Kippen“ des Stifts weitestgehend verhindern.
Delta mit fischertechnik-Potis
Kapitel 7 (Der Delta)
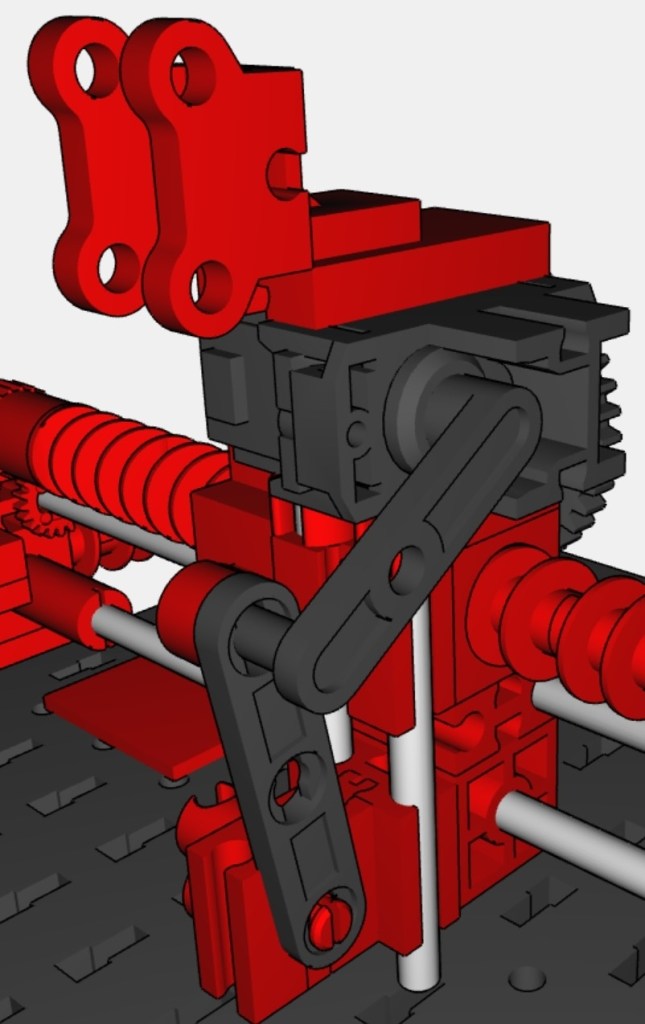
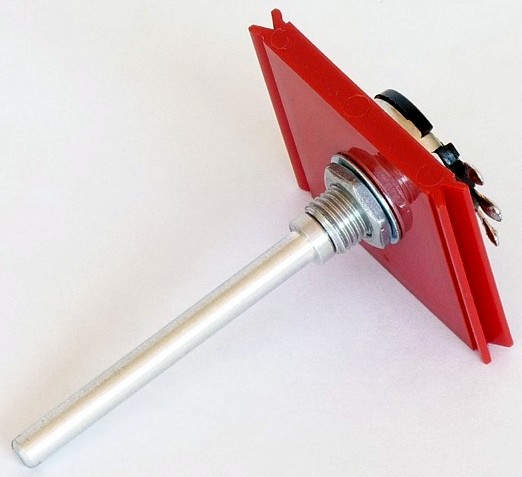
Achtung: Von den fischertechnik-Potis gibt es unterschiedliche Ausführungen. Die jüngste, die auch mit dem Baukasten zum Buch ausgeliefert wurde, hat ein längeres Gewinde als das des im Buch verwendeten OMEG-Potis PC16BU. Damit das Kupplungsstück in der „Schulter“ nicht blockiert ist eine geringfügige Modifikation am Modell erforderlich.
Besitzt das Potentiometer ein längeres Gewinde, so wie in der folgenden Abbildung?
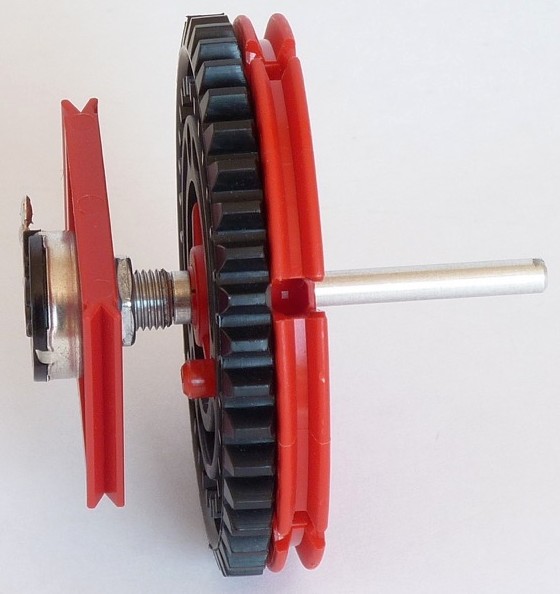
Lösung: Auf die Achse des Potis werden das Z40 und die Drehscheibe 60 – abweichend von der Beschreibung auf S. 339/340 (Abb. 7-5) im Buch – direkt und ohne Kupplungsstück montiert (siehe nachfolgende Abbildung).
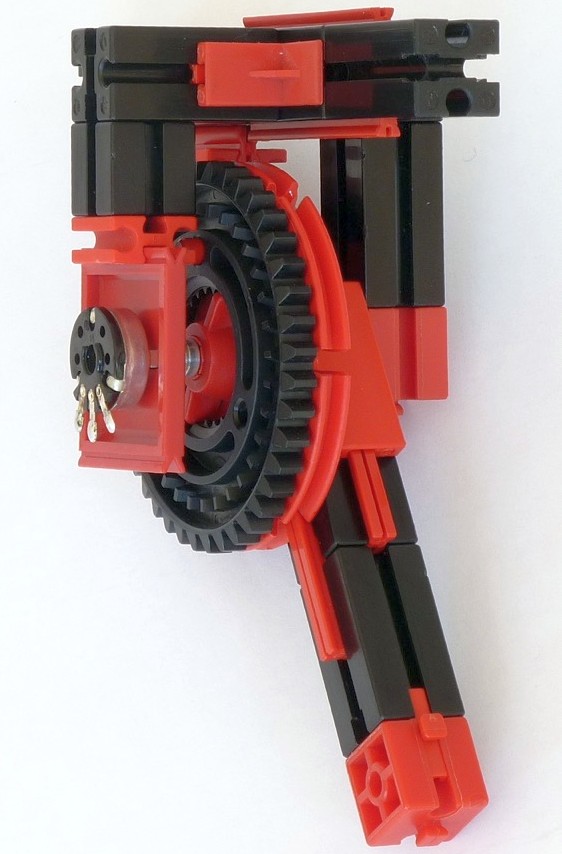
Der Flachstein mit dem Poti wird anschließend nicht in die Nut einer Schneckenmutter m=1 (Abb. 7-7), sondern in die eines BS 7,5 geschoben (siehe die folgende Abbildung).
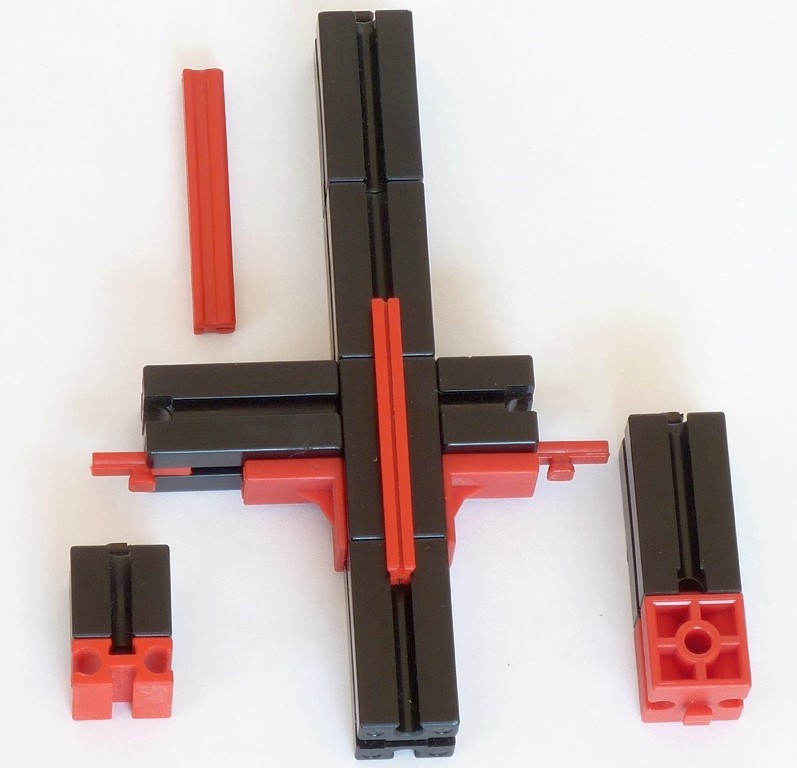
Die untenstehende Abbildung zeigt noch einmal die für das „Kreuz“ der Schulter erforderlichen Bausteine: Der BS 15 links unten ersetzt die Schneckenmutter m=1.
Anpassung der Handposition
Kapitel 7 (Der Delta)
Tipp: Die Positionen der „Hand“ des Delta bei den Spielen Solitaire und Tic-Tac-Toe sind nach dem Anlernen möglicherweise nicht optimal. Unser Leser Dr. Meißner hat ein Programm geschrieben, mit dem die Positionen elegant korrigiert werden können.
Stimmen die Positionen der „Hand“ des Delta nach dem Teach-In nicht exakt?
Lösung: Das von Herrn Dr. Meißner entwickelte Windows-Programm „Poti_zu_xyz.exe“ rechnet die Widerstandswerte der Potentiometer in kartesische Koordinaten (in mm) um. Anschließend kann man durch Ausmessen der Positionsabweichung die Koordinantenwerte korrigieren.
Die so korrigierten kartesischen Koordinaten werden dann wieder in Widerstandswerte der Potentiometer zurück gewandelt.
Die zip-Datei „Poti-zu-xyz“ enthält eine Nutzungsbeschreibung, den gut dokumentierten Quelltext (in C) und das ausführbare Programm selbst.
